RalphTrimble
TVWBB Diamond Member
Yah, I understand, but I wanted to elaborate the reason why a separate ground was used for the probes, and why it might not be needed on the HMv4.2 (yet to be determined). My current HM is v4.2.4 and I jumpered the Servo/Blower GND pin on the CAT5 jack to a spare pin on the CAT5 jack and use that for the probe ground, I get no noise at all over a 50"+ CAT5 cable thats been out in the weather for more than a year, so I would say this works fine.... and a big "HATS OFF" to you is in order for such huge improvements on the HM in recent months!
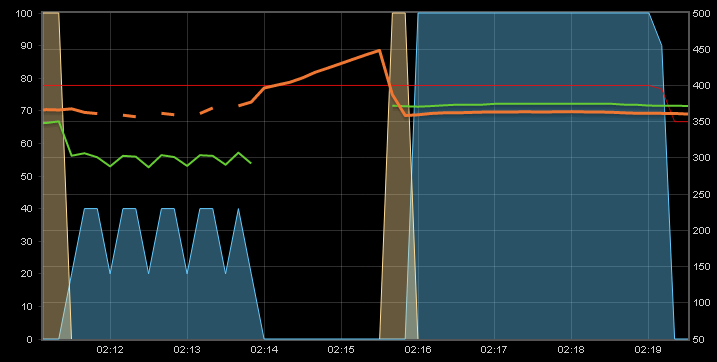
EDIT: And BTW, I've been experimenting with the new Startup Blower feature and found it to work outstanding on mid to high temp cooks, but for low and slow on my Fauxmado it still causes overshoot even if I set the low speed max between 10-30%. To hold 225 my Fauxmado requires very low air flow and any amount of fan blowing seems to push it into overshoot.... So I would still kinda like to see the "Fan on above XX%" feature some day. I think I had this I wouldn't need to change my HM configuration when I switch from low and slow to high heat cooks...
EDIT: And BTW, I've been experimenting with the new Startup Blower feature and found it to work outstanding on mid to high temp cooks, but for low and slow on my Fauxmado it still causes overshoot even if I set the low speed max between 10-30%. To hold 225 my Fauxmado requires very low air flow and any amount of fan blowing seems to push it into overshoot.... So I would still kinda like to see the "Fan on above XX%" feature some day. I think I had this I wouldn't need to change my HM configuration when I switch from low and slow to high heat cooks...
Last edited: