Bryan, I just wanted to thank you for making the change allow both the servo and fan to work at the same time. I used it tonight for the first time and this setup is outstanding! The best of both worlds, the fan stokes up your fire for you, once the pit starts approaching the target temp the fan turns off and the servo takes over using the natural convection of the fire to gracefully land on the target temp. The ping pong valve works nice, but the servo damper is a much simpler and more natural way to manage a pit that is sealed up tight and insulated. I think the eagle landed on this one, I am extremely happy with how this system works!
I also like that you allow the opposite configuration as welll, use the fan to control the fire and the damper basically as a choke valve (smart ping pong ball! LOL) This mode should come in handy for high heat pizza cooks to keep runaway temps in check.
This setup seems to have all my requirements covered and I think the fan/servo combo makes it the most unique and versatile controller available... Is there any other controller out currently that has this? If not I would bet one will crop up sooner than later...
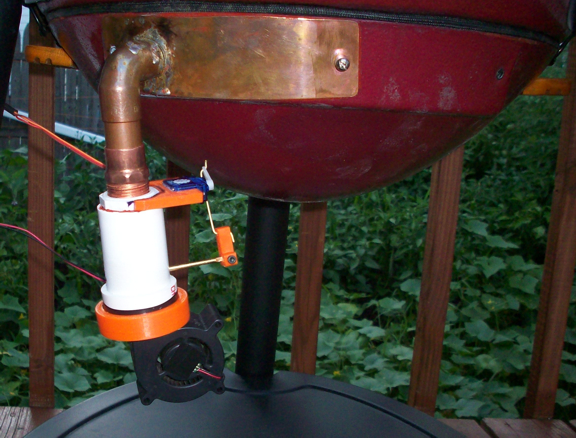
Here is a pic of my servo valve with the fan installed on my FauxMado grill...
I know I have asked before about the possibility of changing the rca header for the fan to something that could possibly work for the servo or the fan, now we have both and the wiring is getting a little more out of hand. As far as I can count we need 4 wires for this system, +5V, GND, Servo Control, Fan Control. (servo and fan sharing the same ground) I know you were looking for commonly available wiring when you choose the RCA cable, while using this setup for the first time tonight I thought perhaps a telephone jack would work well for the fan and servo connection? It's small, commonly available, has 4 wires.... My initial thought was Cat5 but 8 wires is overkill and makes the plug too bulky. But a phone jack is nice and small. I know you were thinking of moving to some sort of industry standard plug, but I kinda like the idea of all the wires for my servo and fan coming down one small phone cable...
")
")