I've been back and forth, had jitter, and zero jitter depending on the combination of the above. I had initially not been fond of the move and rest firmware because my MG90s would sometimes twitch and stick open and the HM would put the servo to rest in the open position letting my fire go out of control. Frustrated with this I changed to a Hextronik HXT900 servo which never jittered or twitched a bit, working great for a year (powered on 24/7). Recently I flashed the latest firmware which I think keeps the servo energized and my servo was dead a few days later. Coincidence? Probably... I ordered another HXT900 and am installing it tonight, guess we'll see if it takes another year to kill this one! BTw, the HXT servo doesn't fit the std RD, the shoulder is too shallow, needs a custom part.
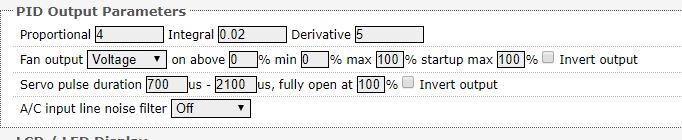
What settings do you have for the HXT900? I'm trying to calibrate mine but cant get anywhere. Its closed or 360 partially open. Can't dial it in yet

")