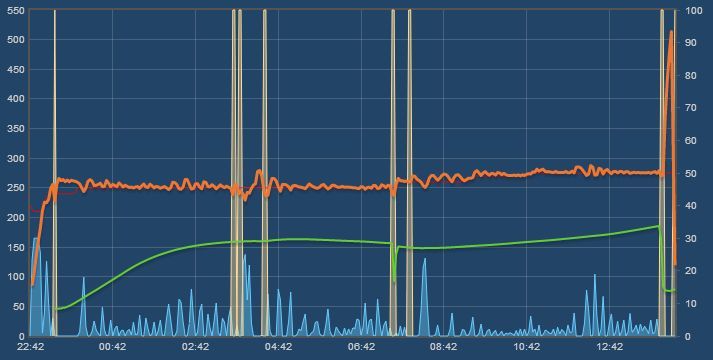
I did a long test run (16 hours) on my Heatermeter (thanks again Bryan) with a case (thanks again Tom) with a Rotodamper (thanks again Ralph - does anyone see a trend here?). I have a large BGE. I was using the PID Debug screen to try and dial in my PID settings and I think I made progress, but just wanted to confirm a few things and ask a few questions. The questions are a little disjointed, so bear with me.
1. First, I figured out that on the debug screen, adding up the three numbers equals the fan percentage. I was having overshoot problems followed by undershoot problems followed by overshoot problems, etc. I raised my D because I understand it tries to predict the future and I did see some preemptive correcting going on after that but I was not getting the really tight control like some o the graphs Ralph has posted. I think my primary problem is that the BGE is slow to respond (maybe because of the mass of the ceramics) but once it responds, it is very sensitive to airflow so a little goes a long way. The cycle I was experiencing is the temp would drop, the fan would crank up, the response was slow so the fan would crank up more and then the temp would start rising slowly. Then finally the fan would stop a couple degrees from target but by that point it had already pumped enough oxygen in to overshoot by sometimes 25 degrees for a good 15-20 minutes. When the temp would start dropping, I would get the reverse - the drop would accelerate and the fan wouldn't really kick in until the temp went under the setpoint and by that time it would take a while to correct and the cycle would start over again. I felt like the algorithm wasn't good at looking back in time far enough for the "cause" of its current status. I finally dialed in my settings at B=0, P=2, I=0.002, and D=7. These look substantially different than a lot of the successful PID settings people have posted.
2. The above settings were pretty stable, but I noticed 2 things and have 2 questions. First it was way more stable at 250* than at 225*. Is it possible that my egg might just have a hard time with 225*? I think I have it pretty tightly sealed, but maybe not, and the rotodamper should help with this.
3. The other thing I noticed is that it was pretty stable with these settings but at all setpoints, it would stabilize around 2 degrees below the setpoint. That baffled me, so if anyone has any ideas, I would appreciate hearing them.
4. Here is a question I have been wondering about. Is the PID algorithm a "learning" algorithm? In other words does it dial itself in over time as it learns from its overshoots and undershoots and then "remember" that the next time you use it? I ask this, because I thought I saw the amplitude of the overshoots and undershoots getting smaller before I was changing settings. If it does learn, maybe I should reset back closer to the defaults, fire up the egg and just let it go for a while without fiddling with the settings so it can learn without me switching the variables/inputs all the time.
5. Ralph and Bryan have talked about damper only mode. All my testing was with the fan. For 225*, should I try damper only? If so, how do I do that? Just check the box that says "on at max only" for fan speed? If I do this, will I need to adjust the PID settings since the ones I have are based on the fan blowing AND the damper being opened instead of just the damper being opened? I would think so since to achieve the same result as the fan achieved, the damper will need to be opened more since nothing is pushing the air through the hole. Also, do I remove the fan or can I leave it attached since convection can suck in through the opening?
Sorry for all the questions, but hopefully some answers can help others too. I would love to dial this baby in for some tight, responsive control. Thanks again guys. This is fun.
")